Проекты
Проекты
Тактильное исследование поверхности с помощью UR5 GitHub
Май 2026 – настоящее время | Лаборатория тактильной робототехники | Астана, Казахстан
Инструменты и технологии: UR5, URScript, Python, trimesh, NumPy, SciPy (ICP), pandas, Matplotlib, Docker (URSim), силовой датчик ATI Nano17, NI-DAQ
- Создал сквозной пайплайн для автоматического тактильного исследования силиконового конуса с помощью коллаборативного робота UR5, от геометрии поверхности из CAD-модели до выполнения последовательностей касаний с синхронной записью силы контакта как на симулированном, так и на реальном роботе.
- Сэмплировал 3000 точек поверхности с нормалями из STL-модели конуса с помощью
trimesh, затем откалибровал относительно базового фрейма робота методом ICP с фиксированной вертикальной осью и подбором только смещения (без вращения, с осью конуса, зафиксированной вертикально, чтобы избежать ложного наклона из-за точек калибровки, сосредоточенных у вершины), достигнув точности совмещения около 2,2 мм RMS. - Сгенерировал схемы касаний для полного покрытия поверхности и для 15 вертикальных полос вокруг конуса с масштабируемым по высоте наклоном ориентации (5°–15°) для зазора инструмента, затем выполнил их через собственный решатель прямой/обратной кинематики UR5 на Python (необходимый, поскольку встроенный в контроллер решатель IK с одним начальным приближением не сходится для точек, разнесённых вокруг конуса), передавая URScript-последовательности «подход–нажатие–отвод» по сырому TCP-сокету.
- Синхронизировал показания силы ATI Nano17 с потоком TCP-поз UR5 в реальном времени через NI-DAQ, автоматически определяя каждое нажатие и записывая его пиковую силу и позу для последующего анализа.
Автоматизированная сборка фонарика с помощью UR5 GitHub Отчёт
Март 2026 | ME 5286 – Робототехника, Университет Миннесоты | Миннеаполис, MN
Инструменты и технологии: UR5, RoboDK, Python, планирование движения в декартовом и суставном пространстве, пневматическое крепление
- Запрограммировал коллаборативного робота UR5 через Python API RoboDK для автономной сборки трёхкомпонентного фонарика (корпус, батарея, торцевая крышка) без участия человека.
- Определил 15 декартовых целевых поз для операций захвата, перемещения и вставки компонентов; использовал движение в пространстве суставов для быстрых переходов и линейное декартово движение вблизи точек контакта для предотвращения столкновений.
- Реализовал многоходовую процедуру предварительного завинчивания с последующим финальным затягиванием с контролем момента, скоординированную с пневматическим патроном и оптическим датчиком для надёжной фиксации деталей.
- Вся последовательность сборки выполнена за 1 минуту 39 секунд, в рамках требования в 110 секунд.
Обход препятствий и навигация по маркерам ArUco на TurtleBot3 GitHub Отчёт
Осень 2025 | Финальный проект CSCI 5551 / EE 5271, Университет Миннесоты | Миннеаполис, MN
Инструменты и технологии: TurtleBot3 Burger, ROS2 Humble, LiDAR, камера Raspberry Pi, Gazebo, RViz, Python
- Разработал систему обхода препятствий на основе LiDAR для TurtleBot3 Burger с использованием двух ROS2-узлов:
obstacle_detector(контролирует передний сектор LiDAR и публикует булевы топики об обнаружении препятствий) иobstacle_avoidance(переопределяет команды скорости для поворота и отступления при обнаружении препятствия в пределах 30 см). - Интегрировал камеру Raspberry Pi на TurtleBot3 Burger, откалибровал её внутренние параметры с помощью пакета ROS2 на основе шахматной доски и добавил статический TF-фрейм для корректного представления положения камеры относительно базового звена робота.
- Реализовал отслеживание и следование по маркерам ArUco: узел
aruco_followerсовмещает визуальное направление на маркер с данными дальности LiDAR для движения робота на заданное расстояние к цели, останавливаясь при выходе маркера из поля зрения камеры. - Протестировал оба алгоритма сначала в симуляции Gazebo, затем перенёс на реального робота с настройкой фильтрации шума LiDAR для надёжной работы в реальных условиях.
Реабилитационный экзоскелет плечевого сустава Новости Интервью
Сентябрь 2023 – Апрель 2025 | Назарбаев Университет & CEMRR | Астана, Казахстан
Инструменты и технологии: САПР, 3D-печать, проектирование четырёхзвенных механизмов, кабельно-приводные параллельные механизмы, механическое прототипирование
- Спроектировал и собрал 5-DOF гибридный роботизированный экзоскелет плечевого сустава, комбинацию 2-DOF вращательного четырёхзвенного механизма и 3-DOF кабельно-приводного параллельного механизма, обеспечивающий движения плеча в полном диапазоне с сохранением выравнивания с центром вращения плечелопаточного сустава.
- Разработал 3D-печатные миниатюрные модели прототипа для проверки сопряжения механизма с человеком перед масштабированием до полноразмерного устройства.
- Создал полностью собранный носимый экзоскелет для интенсивных задачно-специфичных упражнений пациентов после инсульта, объединив механическое проектирование с клиническими требованиями реабилитации.
- Работа началась как дипломный проект бакалавриата в Назарбаев Университете и была расширена до полнофункционального устройства в Центре передовых исследований в области медицинской робототехники (CEMRR).



3D-печатная миниатюрная модель сопряжения плечевого механизма человека и робота Статья
Январь 2023 – Сентябрь 2023 | Назарбаев Университет | Астана, Казахстан
Инструменты и технологии: SolidWorks, MATLAB, кинематика четырёхзвенных механизмов, кабельно-приводные параллельные механизмы, 3D-печать
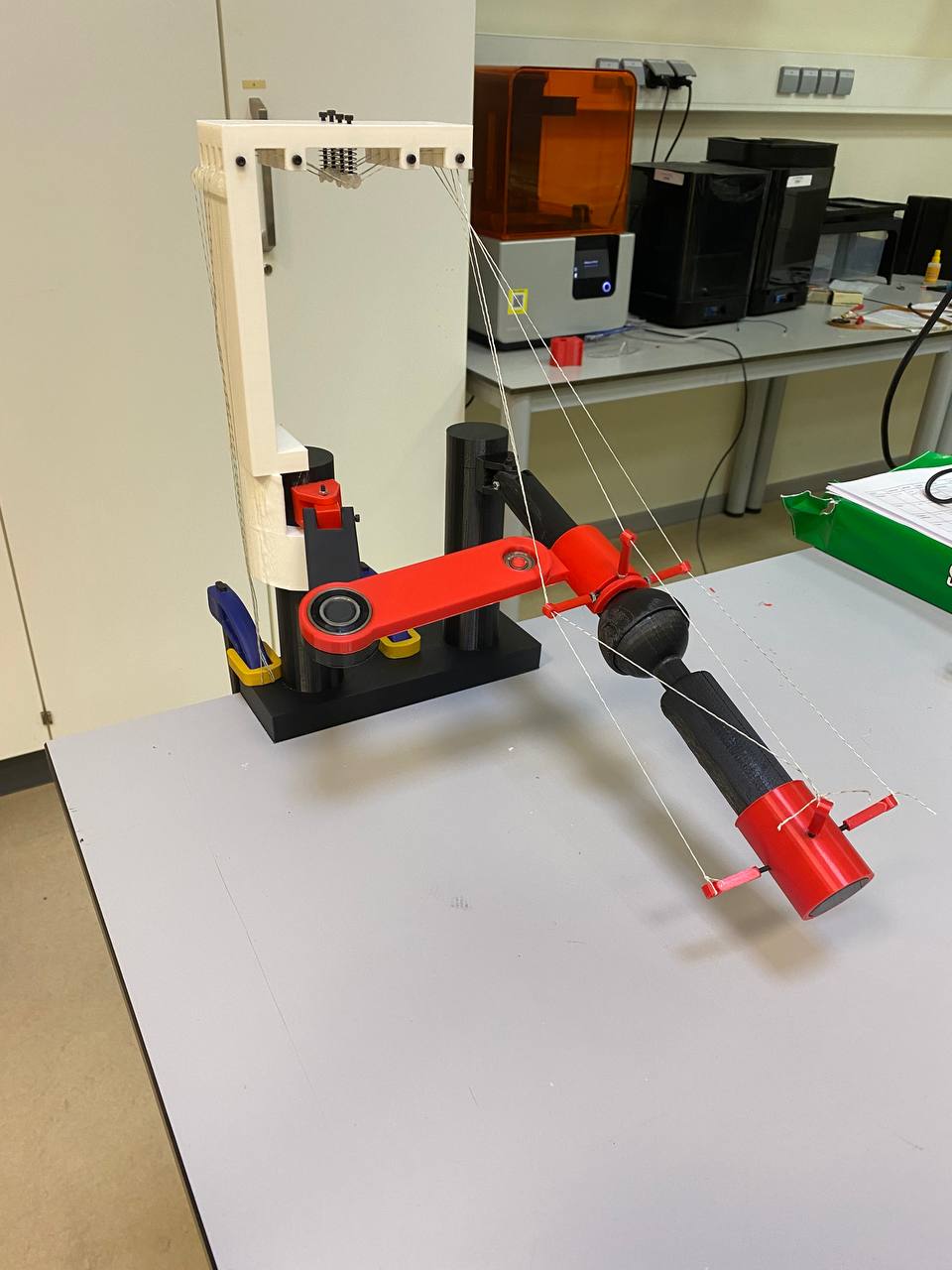
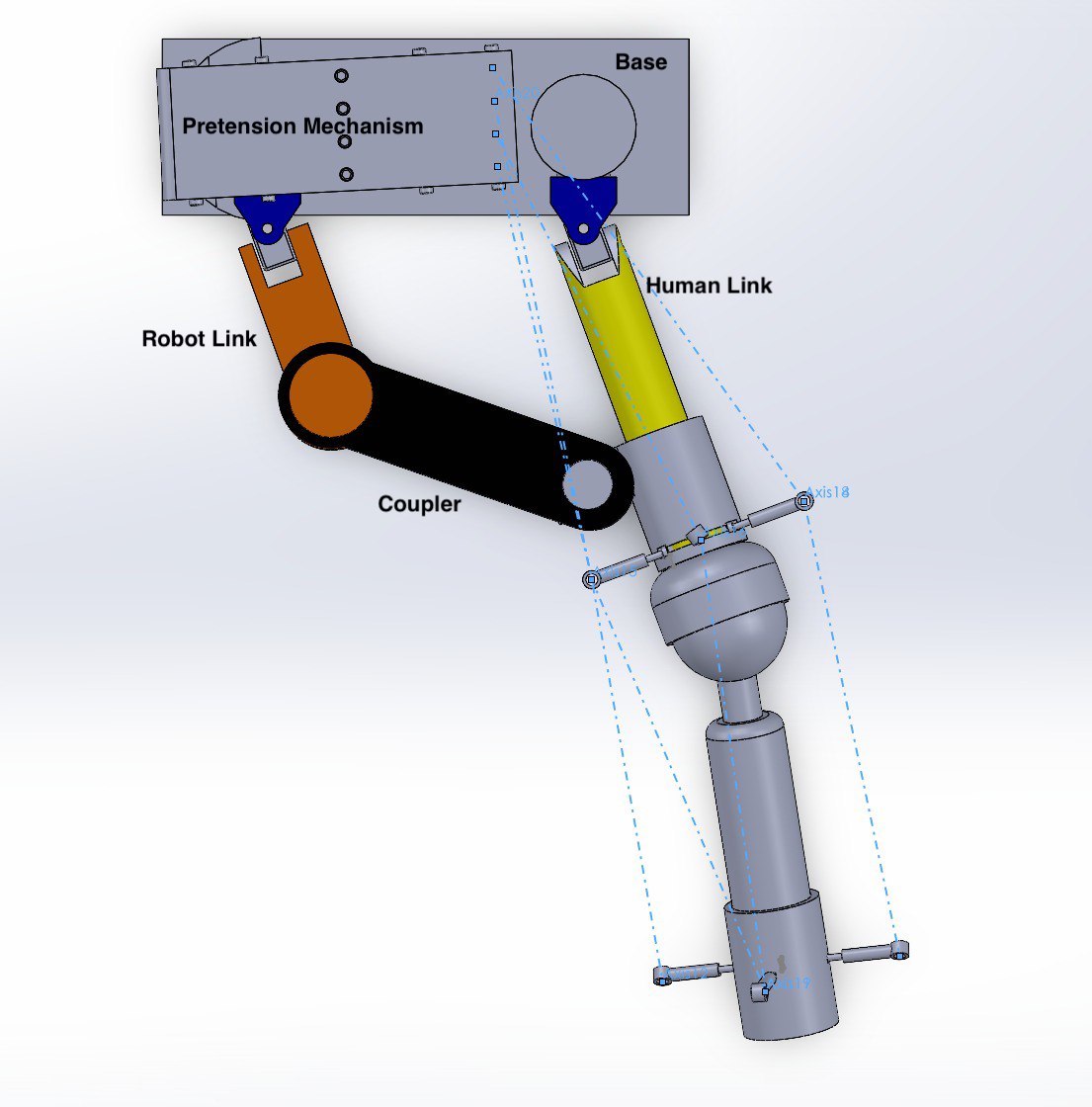
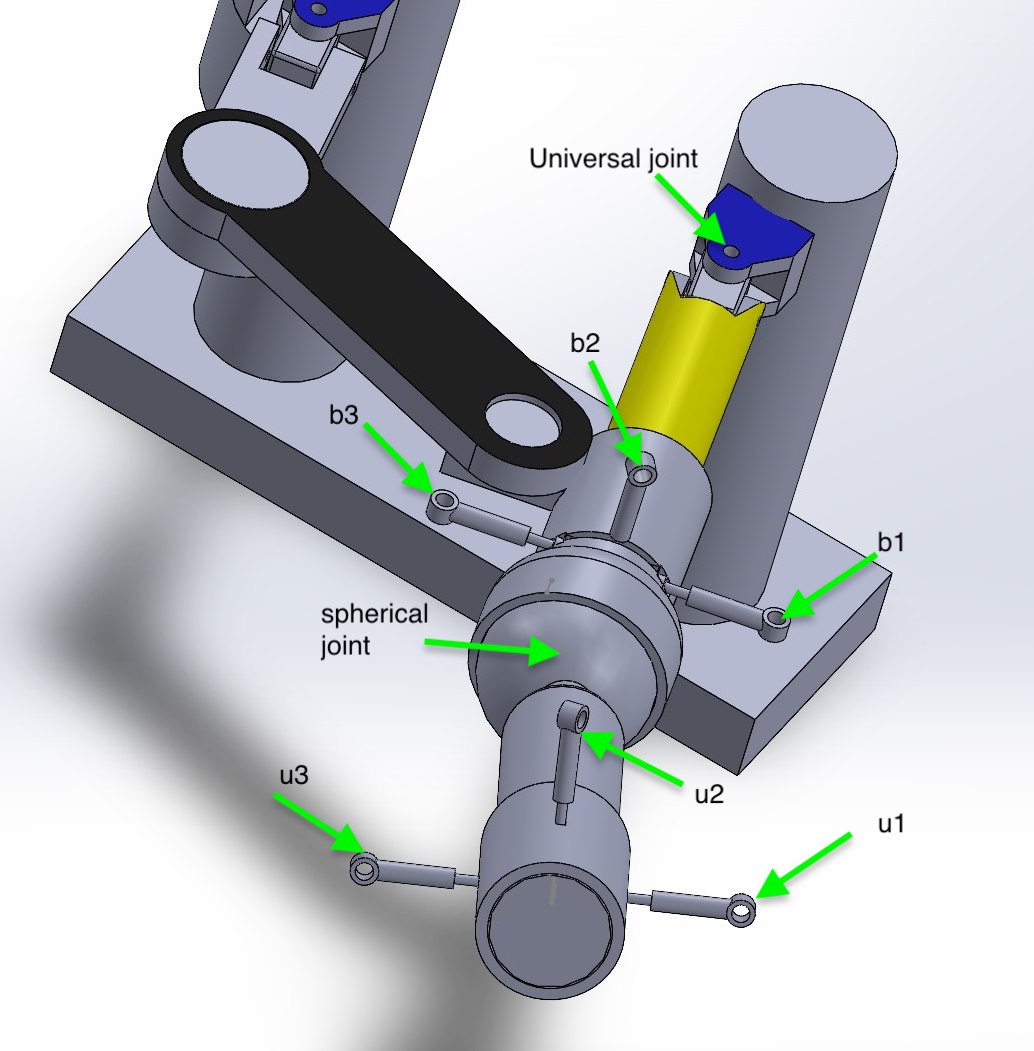
- Спроектировал 5-DOF миниатюрный механизм сопряжения плечевого сустава, объединяющий 2-DOF четырёхзвенный кривошипно-коромысловый механизм для плечевого пояса с 3-DOF кабельно-приводным параллельным механизмом для плечелопаточного сустава, моделируя три вращательные и две поступательные степени свободы плеча.
- Вывел прямую и обратную кинематику как для четырёхзвенного механизма, так и для кабельно-приводного механизма, затем проверил уравнения относительно CAD-модели в SolidWorks с помощью MATLAB, добившись совпадения длин кабелей и углов суставов с точностью до 1–2 мм и нескольких градусов.
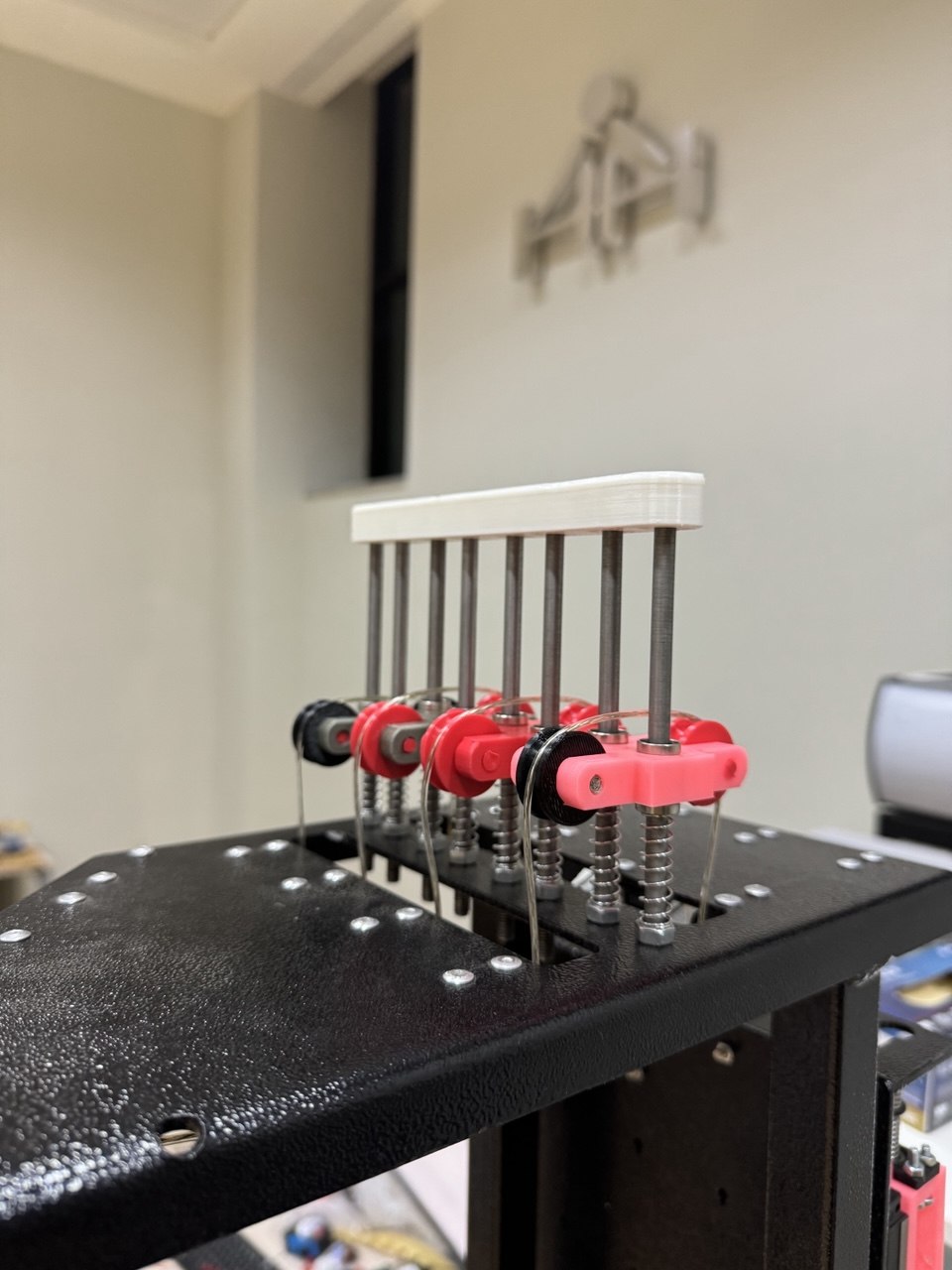
- Разработал механизм предварительного натяжения для устранения провисания и схода кабелей, а также собрал регулируемый 3D-печатный прототип с переставляемыми точками крепления кабелей для проверки различных стратегий сопряжения.
- Этот базовый прототип позже стал основой для полноразмерного 5-DOF экзоскелета, разработанного в CEMRR.