Projects
Projects
Tactile Surface Exploration with UR5 GitHub
May 2026 – Present | Tactile Robotics Laboratory | Astana, Kazakhstan
Tools & Technologies: UR5, URScript, Python, trimesh, NumPy, SciPy (ICP), pandas, Matplotlib, Docker (URSim), ATI Nano17 force sensor, NI-DAQ
- Built an end-to-end pipeline for automated tactile exploration of a silicone cone with a UR5 collaborative arm, from CAD-derived surface geometry to executed touch sequences with synchronized contact-force recording on both simulated and physical robots.
- Sampled 3,000 surface points with normals from the cone STL using
trimesh, then calibrated to the robot base frame with an axis-constrained, translation-only ICP fit (cone axis pinned vertical to avoid a spurious tilt from apex-clustered touch points), reaching ~2.2 mm RMS alignment error. - Generated full-surface and 15-strip vertical touch-pose patterns with height-scaled orientation tilt (5°–15°) for tool clearance, then executed them via a custom Python UR5 IK solver (needed because the controller's single-seed IK fails to converge for poses spread around the cone), streaming URScript approach-press-retract sequences over a raw TCP socket.
- Synchronized ATI Nano17 force readings with the UR5's real-time TCP pose stream via NI-DAQ, auto-detecting each press and logging its peak force and pose for offline analysis.
Automated Flashlight Assembly with UR5 GitHub Report
March 2026 | ME 5286 – Robotics, University of Minnesota | Minneapolis, MN
Tools & Technologies: UR5, RoboDK, Python, Cartesian & joint-space motion planning, pneumatic clamping
- Programmed a UR5 collaborative robot via the RoboDK Python API to autonomously assemble a three-part flashlight (head, battery, endcap) without human intervention.
- Defined 15 Cartesian targets for pick-and-place, insertion, and fastening operations; used joint-space motion for fast transits and Cartesian linear motion near contact points to prevent collisions.
- Implemented a multi-stroke pre-threading routine followed by torque-controlled final tightening, coordinated with a pneumatic chuck and optical sensor for stable part fixturing.
- Completed the full assembly sequence in 1 minute 39 seconds, within the 110-second requirement.
TurtleBot3 Obstacle Avoidance & ArUco Marker Navigation GitHub Report
Fall 2025 | CSCI 5551 / EE 5271 Final Project, University of Minnesota | Minneapolis, MN
Tools & Technologies: TurtleBot3 Burger, ROS2 Humble, LiDAR, Raspberry Pi camera, Gazebo, RViz, Python
- Developed a LiDAR-based obstacle avoidance pipeline on TurtleBot3 Burger using two ROS2 nodes:
obstacle_detector(monitors the front LiDAR sector and publishes Boolean obstacle topics) andobstacle_avoidance(overrides velocity commands to turn and back away when an obstacle is within 30 cm). - Integrated a Raspberry Pi camera onto TurtleBot3 Burger, a non-standard hardware addition, calibrated its intrinsic parameters using a ROS2 checkerboard calibration package, and added a static TF frame to correctly represent the camera pose relative to the robot base link.
- Implemented ArUco marker tracking and following: the
aruco_followernode fuses camera-derived heading to the marker with LiDAR range measurements to drive the robot to a target distance while stopping when the marker leaves the camera's field of view. - Validated both algorithms first in Gazebo simulation, then transferred them to the real robot with LiDAR noise filtering adjustments for reliable real-world performance.
Shoulder Rehabilitation Robotic Exoskeleton News Interview
September 2023 – April 2025 | Nazarbayev University & CEMRR | Astana, Kazakhstan
Tools & Technologies: CAD, 3D printing, four-bar linkage design, cable-driven parallel mechanisms, mechanical prototyping
- Designed and built a 5-DOF hybrid robotic shoulder exoskeleton, a 2-DOF rotational four-bar linkage combined with a 3-DOF cable-driven parallel mechanism, enabling full-range shoulder rotations while preserving alignment with the human glenohumeral joint center of rotation.
- Developed 3D-printed miniature prototype models to validate human-robot mechanism coupling before scaling up to the full device.
- Completed a fully assembled, wearable exoskeleton targeting intensive task-specific exercises for stroke survivors, bridging the gap between mechanical design and clinical rehabilitation requirements.
- Work originated as a BS graduation project at Nazarbayev University and was extended into a fully functional device at the Center of Excellence in Medical Robotics & Research (CEMRR).



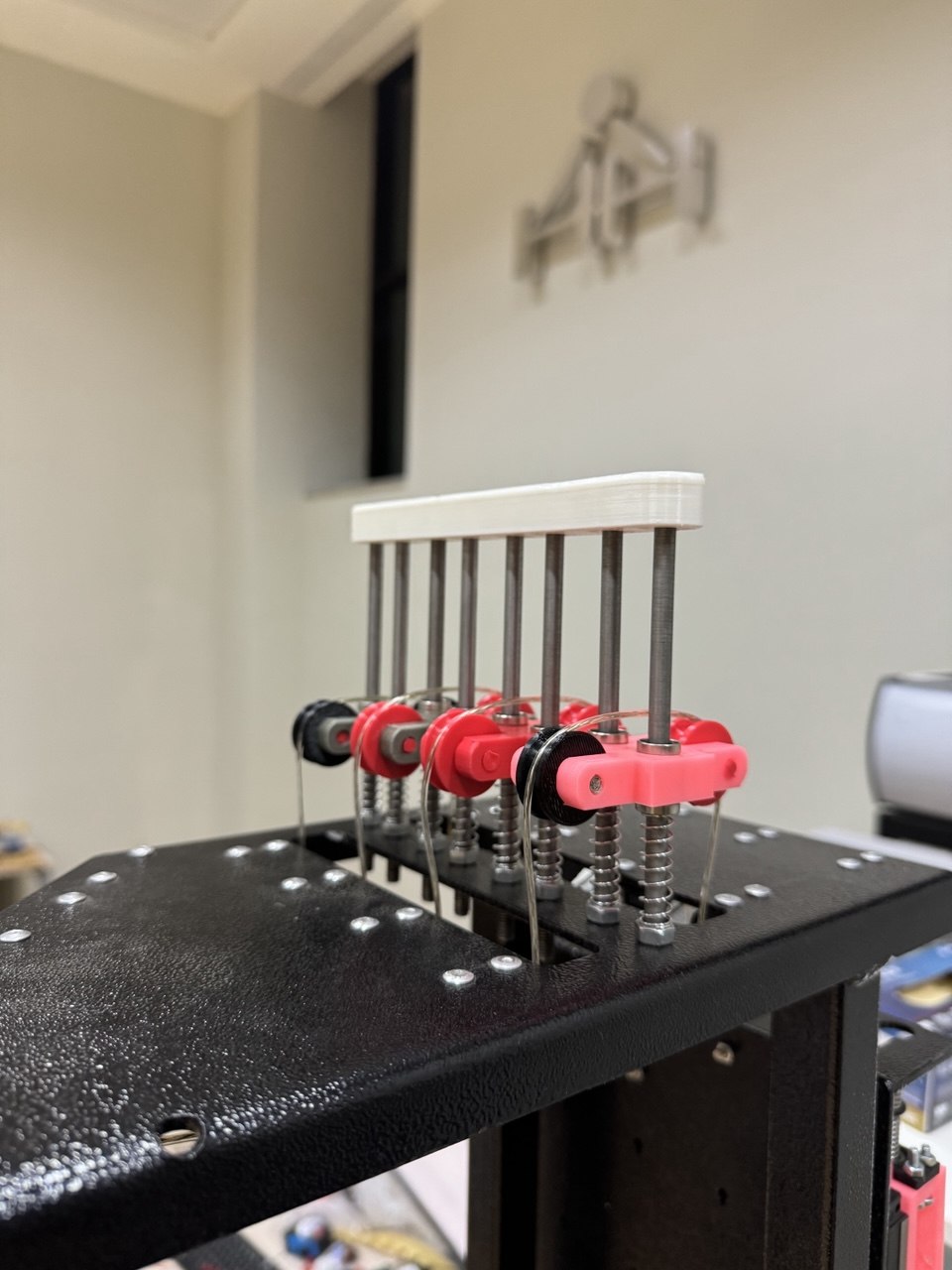
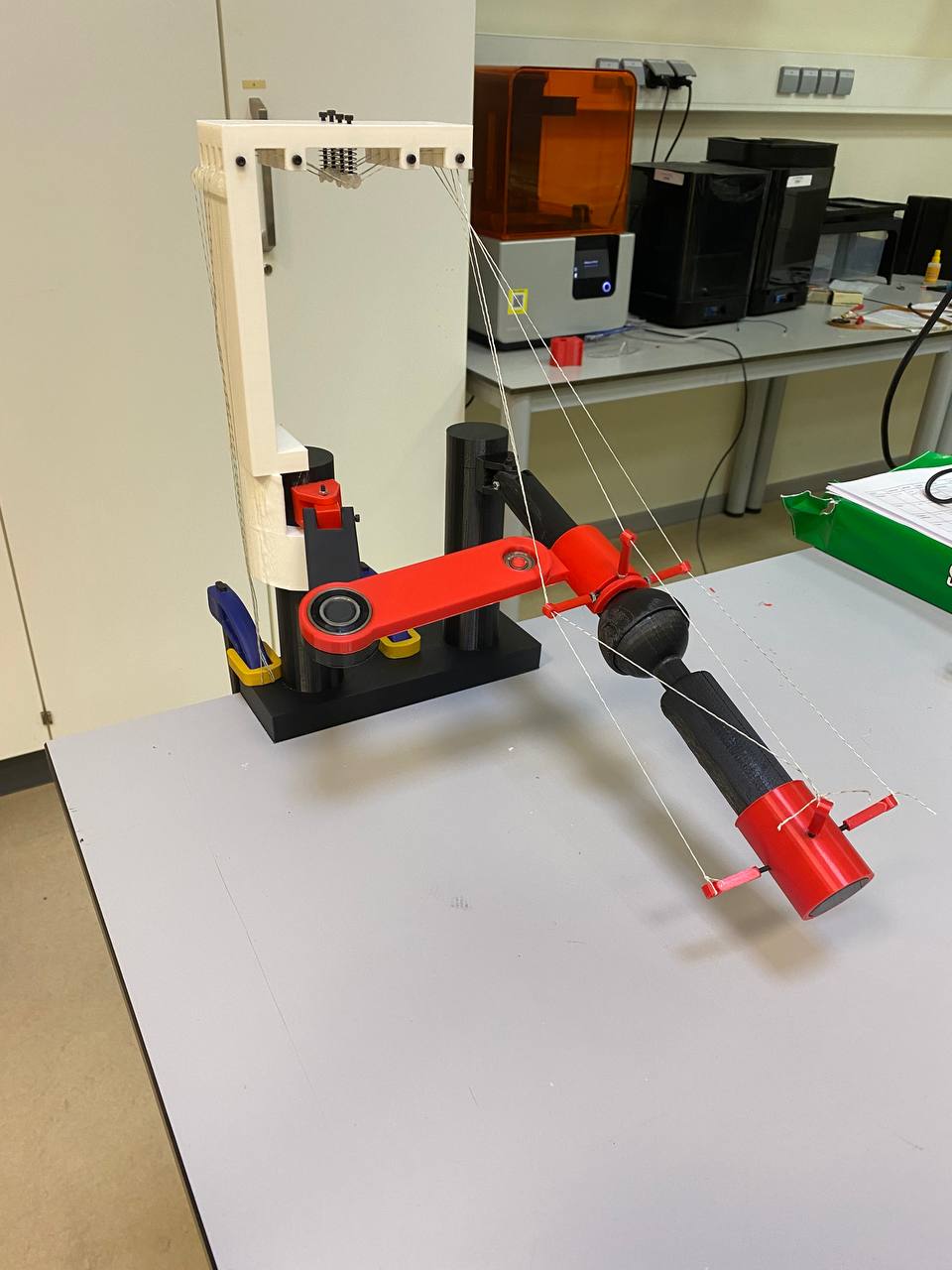
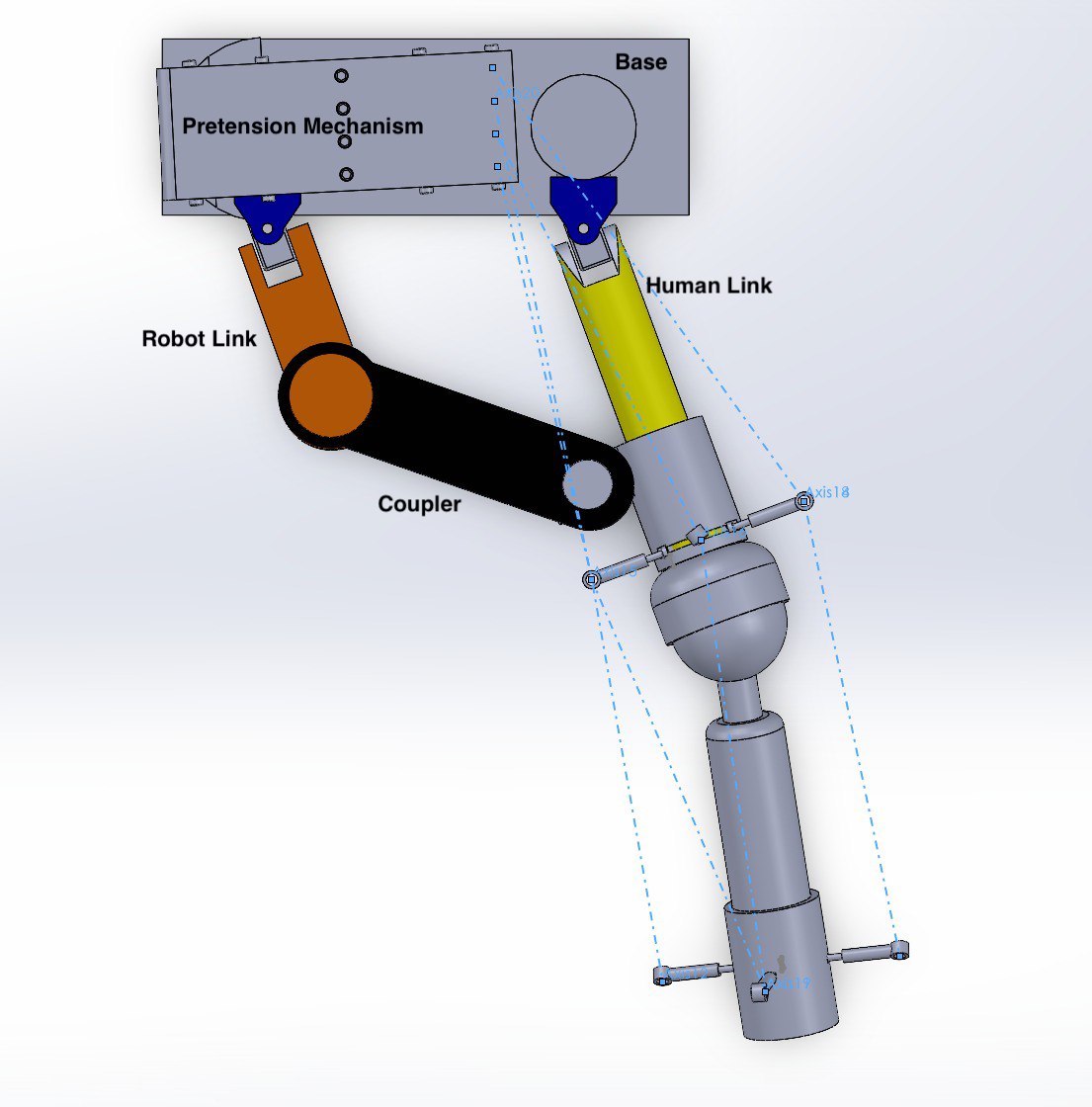
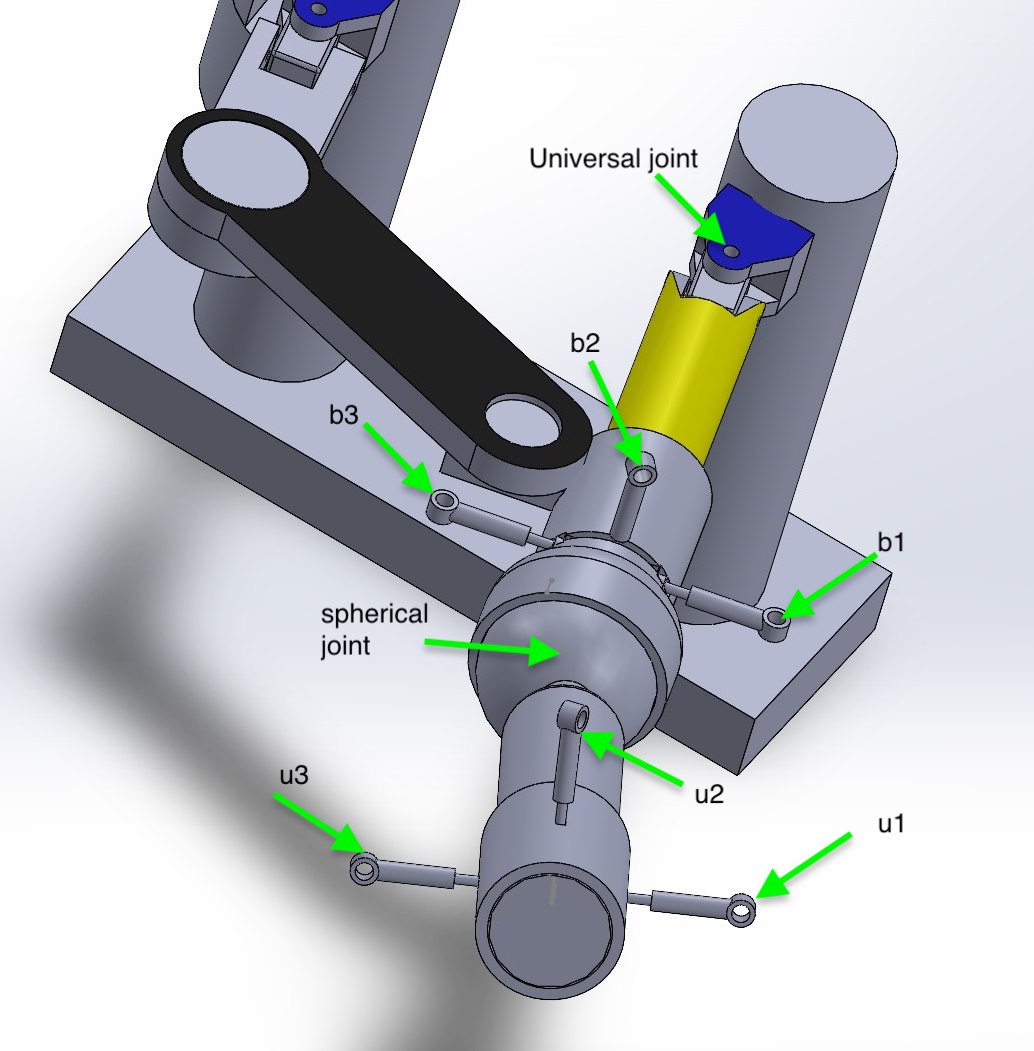
3D-Printed Miniature Model for Human-Robot Shoulder Coupling Paper
January 2023 – September 2023 | Nazarbayev University | Astana, Kazakhstan
Tools & Technologies: SolidWorks, MATLAB, four-bar linkage kinematics, cable-driven parallel mechanisms, 3D printing
- Designed a 5-DOF miniature shoulder coupling mechanism combining a 2-DOF crank-rocker four-bar linkage for the shoulder girdle with a 3-DOF cable-driven parallel mechanism for the glenohumeral joint, modeling the shoulder's three rotational and two translational degrees of freedom.
- Derived forward and inverse kinematics for both the four-bar linkage and the cable-driven mechanism, then validated the equations against a SolidWorks CAD model in MATLAB, matching cable lengths and joint angles to within 1–2 mm and a few degrees.
- Designed a pretension mechanism to eliminate cable slacking and derailment, and built an adjustable 3D-printed prototype with reconfigurable cable connection points for testing different coupling strategies.
- This foundational prototype later informed the full-scale 5-DOF exoskeleton developed at CEMRR.